Abstract
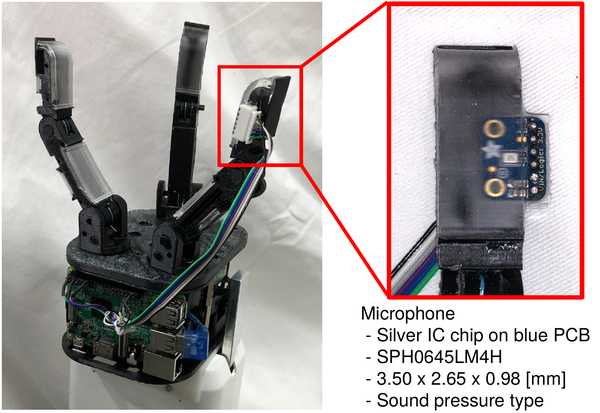
Through vibration measurement, a robot can recognize not only contact state between the robot and a surrounding object but also contact state between surrounding objects. In this research, we develop a robot hand with microphone, by which robots can measure vibration caused by object deformation, collision or slip. Additionally, we propose how to recognize the contact state by vibration measurement.
Publication
in SICE SI2019 Annual Conference (SI2019), 2C4-03
Date
December, 2019
Links